Wiring – Pitch/Yaw Servos

Starting to get more complicated now, so another diagram definitely needed.
Having fitted a GMU 11 Magnetometer, changes to the Van’s (Stein) harness have to be made, since the CanBus now has to route to the left wing.
Also I want to discard unnecessary Molex connectors on any data wiring … so another fresh sheet of paper!
A few design decisions:
The peak current for the pitch/yaw servos combined could be 4.6A. If I powered the Aileron servo from the same cable on the way down to the Pitch/Yaw servos, this would rise to 7.4A. This is probably too much for a 20AWG wire.
But I want to use 20AWG max into each servo DSub, with which my very pricey DSub Crimper can cope. 18AWG means different pins and another crimper. Well I can’t face buying yet another crimper … I could open a crimper shop already!
A solution is to power the pitch/yaw servos separately from the aileron servo. Then I can use 20AWG and fuse 5A, very comfortable for that wire size.
The other consideration is wire run length and voltage drop. If you consult the recommended FAA AC 43.13 Section 4 Page 11-30 you discover that an intermittent 4.6A is just about acceptable with 20AWG and the wire run length (Power & Earth run combined).
Anyway, I decided to go with 18AWG for the power cable runs, and convert to 20AWG where the power splits to each servo.

It’s going to be very hard to reach and alter any of this servo wiring, so no mistakes can be made!
I thought that legible numbering of the DSub Pins might help.

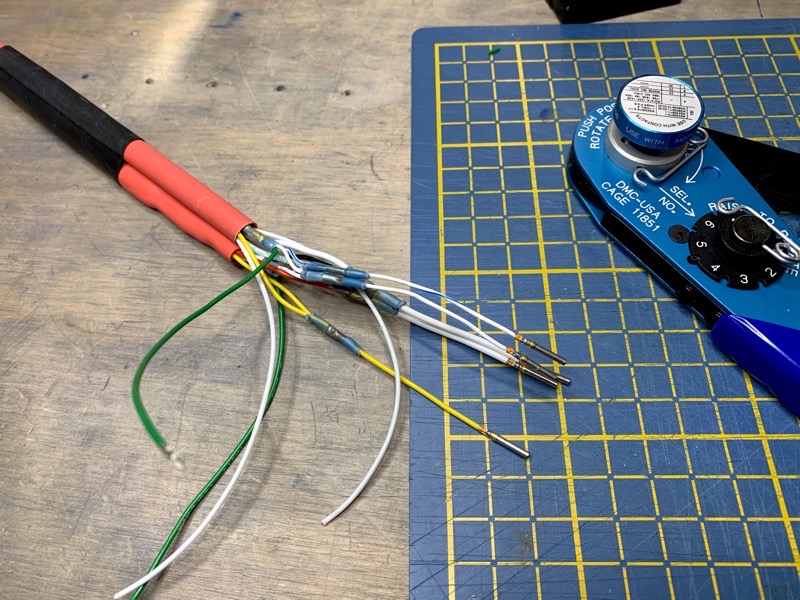
This is the start of the CanBus in the Yaw Servo connector.
Garmin specify max dimensions for the screen daisy chaining in the G3X installation manual.
I found I could get away with a M83519/1-2 size solder sleeve on the 2 core 22AWG Screened cable.
Raychem have a good guide on how to work with these solder sleeves, see my previous Aileron Servo post. When sliding on a sleeve over the wires I somehow managed to get the ground wire under the screen mesh. After the usual heat gun application I discovered quite by accident that the solder had not flowed through to the wire at all … to my horror it just pulled out!
This dented my confidence somewhat, but on reflection easily rectified. Follow the guidance and do it properly!
Make sure the wire being attached is on top of the screen, and always do a firm pull test!
I’m quickly discovering that this wire has a mind of its own, coiling and generally attempting to tangle up at every opportunity.
I discovered another use for a bucking bar when trying to keep the flipping stuff under control : )
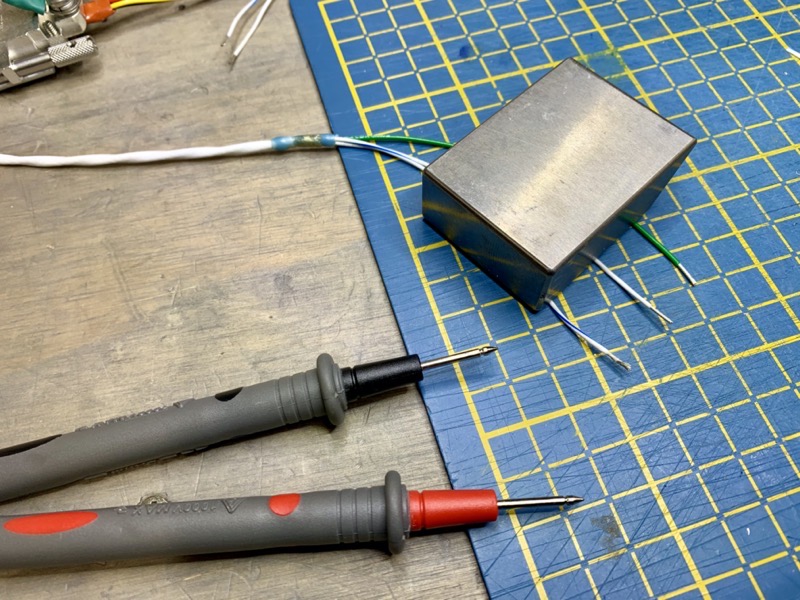
After every joint I’m doing continuity testing to ensure nothing is shorting and the connections are sound.

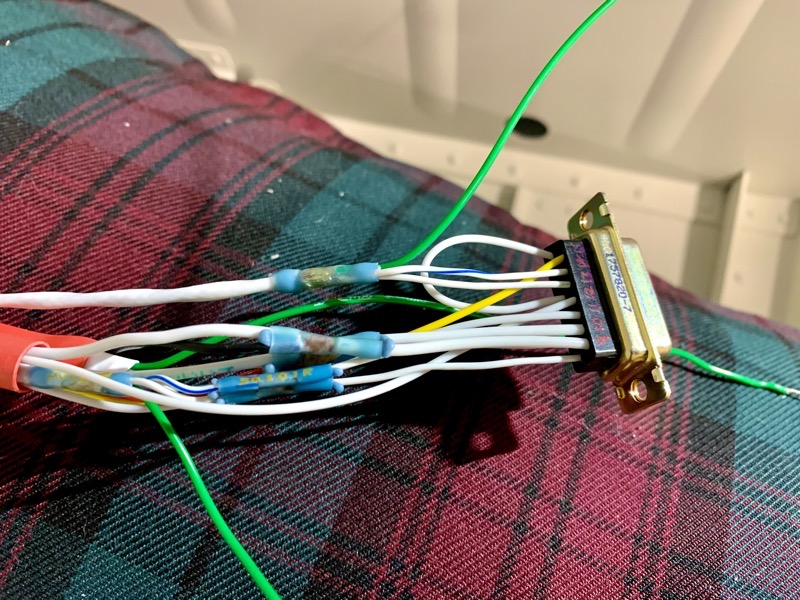
Here’s the Yaw Servo connector, with some self sealing tape to protect the wires.
Actually later on you’ll spot that I ended up inserting some heat shrink tube under the wire retention clamp as well.
Connecting the Yaw Servo harness to the Pitch Servo Harness.
After a test fit, I replicated Van’s harness length for the Yaw to Pitch servo.
This is the first CanBus daisy chain, since the Yaw Servo is the terminator.
I have to say, I’m enjoying using my DMC AFM8 crimper. It’s easy to use and produces first rate crimps. Shame about the price!
Now I had two connectors wired, so I triple checked everything.
I made up some test leads with spare DSub Pins on the ends, so I could insert into connector sockets to check for continuity.
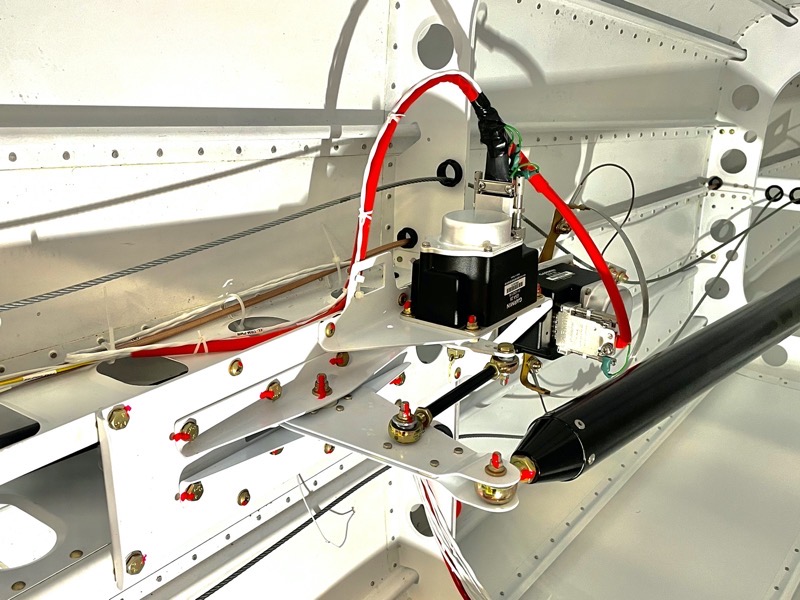
Eventually it all needs to be installed, with the harness secured clear of all control runs.
I ended up with heat shrink tubing around the wires to give it rigidity. The wires from the Yaw Connector have to turn quite quickly due to the elevator pushrod.
I drilled a couple of holes in the servo mount near the connector hole, and used them to tie wrap and secure the harness.
I also left a sort of “service loop”, hoping that if I ever need to work on this wiring I can bring it forward enough to gain access??